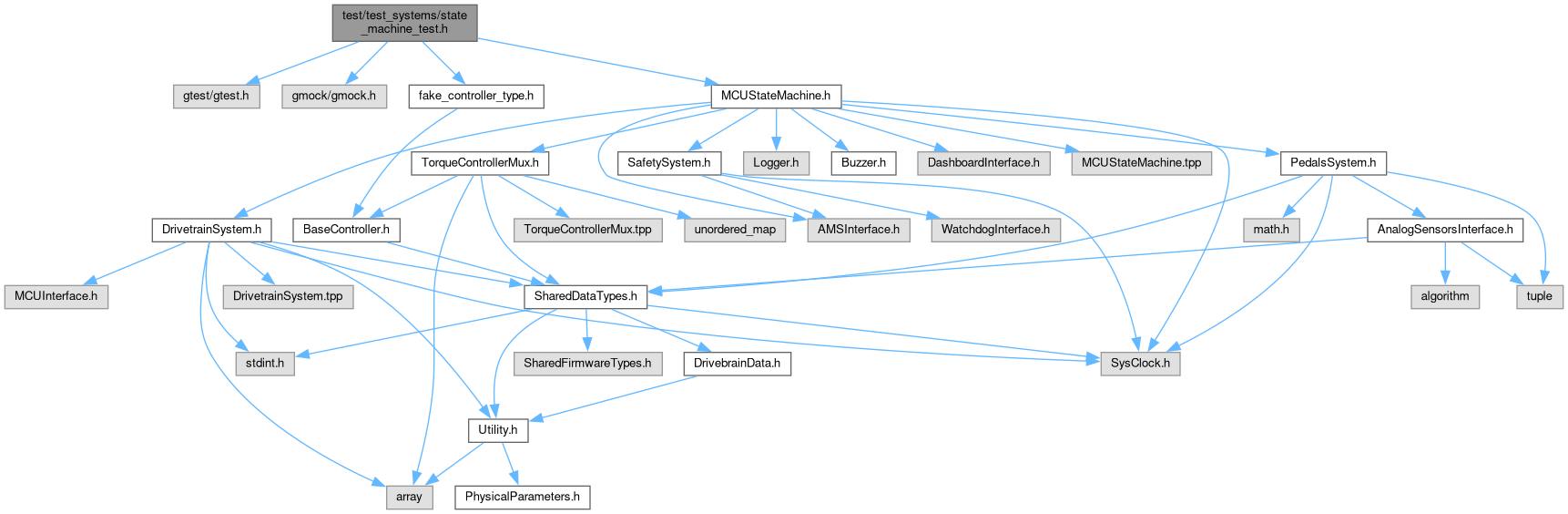
#include <gtest/gtest.h>#include <gmock/gmock.h>#include "MCUStateMachine.h"#include "fake_controller_type.h"
Include dependency graph for state_machine_test.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | DumbController |
| class | DrivetrainMock |
Functions | |
| SharedCarState_s | dummy_state ({}, {}, {}, {}, {}, {}, {}, {}) |
| void | handle_startup (MCUStateMachine< DrivetrainMock > &state_machine, unsigned long sys_time, DrivetrainMock &drivetrain, PedalsSystem &pedals, DashboardInterface &dash_interface) |
| TEST (MCUStateMachineTesting, test_state_machine_init_tick) | |
| TEST (MCUStateMachineTesting, test_state_machine_tractive_system_activation) | |
| TEST (MCUStateMachineTesting, test_state_machine_tractive_system_enabling) | |
| TEST (MCUStateMachineTesting, test_state_machine_ready_to_drive_alert) | |
| TEST (MCUStateMachineTesting, test_state_machine_ready_to_drive_alert_leaving) | |
| TEST (MCUStateMachineTesting, test_state_machine_rtd_state_transitions_to_ts_active) | |
| TEST (MCUStateMachineTesting, test_state_machine_rtd_state_transitions_to_ts_not_active) | |
Variables | |
| DumbController | c |
Function Documentation
◆ dummy_state()
| SharedCarState_s dummy_state | ( | {} | , |
| {} | , | ||
| {} | , | ||
| {} | , | ||
| {} | , | ||
| {} | , | ||
| {} | , | ||
| {} | |||
| ) |
◆ handle_startup()
| void handle_startup | ( | MCUStateMachine< DrivetrainMock > & | state_machine, |
| unsigned long | sys_time, | ||
| DrivetrainMock & | drivetrain, | ||
| PedalsSystem & | pedals, | ||
| DashboardInterface & | dash_interface | ||
| ) |
Definition at line 37 of file state_machine_test.h.
38{
39 // ticking without hv over threshold testing and ensuring the tractive system not active still
40 auto sys_time2 = sys_time;
41
43
45 // hv going over threshold -> tractive system active
47 sys_time2 += 1;
49 sys_time2 += 1;
51 AnalogConversion_s pedals1_data;
52 pedals1_data.raw = 0;
53 pedals1_data.conversion = 0;
54 pedals1_data.status = AnalogSensorStatus_e::ANALOG_SENSOR_GOOD;
55 auto pedals2_data = pedals1_data;
56
57 AnalogConversion_s pedals3_data;
58 pedals3_data.raw = 3000;
59 pedals3_data.conversion = 1.0;
60 pedals3_data.status = pedals1_data.status;
61 auto pedals4_data = pedals3_data;
62 pedals.tick(SysTick_s{}, pedals1_data, pedals2_data, pedals3_data, pedals4_data);
63 // get to enabling inverters
65}
bool start_button_status_
Definition: DashboardInterface.h:37
void tick_state_machine(unsigned long cm, const SharedCarState_s ¤t_car_state)
function to tick the state machine.
void tick(const SysTick_s &tick, const AnalogConversion_s &accel1, const AnalogConversion_s &accel2, const AnalogConversion_s &brake)
overloaded tick function that runs the evaluation of the pedals system. evaluates brake using only mi...
Definition: PedalsSystem.cpp:12
SharedCarState_s dummy_state({}, {}, {}, {}, {}, {}, {}, {})
◆ TEST() [1/7]
| TEST | ( | MCUStateMachineTesting | , |
| test_state_machine_init_tick | |||
| ) |
Definition at line 67 of file state_machine_test.h.
68{
69
70 int mock;
71 AMSInterface ams(&mock, 0, 0, 0, 0, 0);
74 PedalsSystem pedals({}, {});
75 DashboardInterface dash_interface;
76 TCMuxType tc_mux({static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c)}, {true, true, true, true, true});
77 SafetySystem ss(&ams, 0);
78 MCUStateMachine<DrivetrainMock> state_machine(&buzzer, &drivetrain, &dash_interface, &pedals, &tc_mux, &ss);
79 unsigned long sys_time = 1000;
80 EXPECT_EQ(state_machine.get_state(), CAR_STATE::STARTUP);
81 state_machine.tick_state_machine(sys_time, dummy_state);
82 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_NOT_ACTIVE);
83}
@ STARTUP
@ TRACTIVE_SYSTEM_NOT_ACTIVE
this class is for interfacing with the AMS (accumulator management system)
Definition: AMSInterface.h:27
Definition: Buzzer.h:7
Base class for all controllers, which define drivetrain command containing different variations of
Definition: BaseController.h:18
Definition: DashboardInterface.h:83
Definition: state_machine_test.h:13
Definition: MCUStateMachine.h:27
Definition: PedalsSystem.h:42
Definition: SafetySystem.h:9
Definition: TorqueControllerMux.h:61
◆ TEST() [2/7]
| TEST | ( | MCUStateMachineTesting | , |
| test_state_machine_ready_to_drive_alert | |||
| ) |
Definition at line 171 of file state_machine_test.h.
172{
173 int mock;
174 AMSInterface ams(&mock, 0, 0, 0, 0, 0);
177 PedalsSystem pedals({}, {});
178 DashboardInterface dash_interface;
179
180 TCMuxType tc_mux({static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c)}, {true, true, true, true, true});
181 SafetySystem ss(&ams, 0);
182 MCUStateMachine<DrivetrainMock> state_machine(&buzzer, &drivetrain, &dash_interface, &pedals, &tc_mux, &ss);
183
184 unsigned long sys_time = 1000;
186 EXPECT_EQ(state_machine.get_state(), CAR_STATE::ENABLING_INVERTERS);
187
190 state_machine.tick_state_machine(sys_time, dummy_state);
191 EXPECT_EQ(state_machine.get_state(), CAR_STATE::WAITING_READY_TO_DRIVE_SOUND);
192 sys_time += 20;
193
194 dash_interface.buzzer = true;
195 state_machine.tick_state_machine(sys_time, dummy_state);
196
197 EXPECT_EQ(state_machine.get_state(), CAR_STATE::WAITING_READY_TO_DRIVE_SOUND);
198 sys_time += 35;
199
200 dash_interface.buzzer = false;
201 state_machine.tick_state_machine(sys_time, dummy_state);
202
203 EXPECT_EQ(state_machine.get_state(), CAR_STATE::READY_TO_DRIVE);
204}
@ WAITING_READY_TO_DRIVE_SOUND
@ READY_TO_DRIVE
@ ENABLING_INVERTERS
void handle_startup(MCUStateMachine< DrivetrainMock > &state_machine, unsigned long sys_time, DrivetrainMock &drivetrain, PedalsSystem &pedals, DashboardInterface &dash_interface)
Definition: state_machine_test.h:37
◆ TEST() [3/7]
| TEST | ( | MCUStateMachineTesting | , |
| test_state_machine_ready_to_drive_alert_leaving | |||
| ) |
Definition at line 206 of file state_machine_test.h.
207{
208 int mock;
209 AMSInterface ams(&mock, 0, 0, 0, 0, 0);
212 PedalsSystem pedals({}, {});
213 DashboardInterface dash_interface;
214 TCMuxType tc_mux({static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c)}, {true, true, true, true, true});
215 ;
216
217 SafetySystem ss(&ams, 0);
218 MCUStateMachine<DrivetrainMock> state_machine(&buzzer, &drivetrain, &dash_interface, &pedals, &tc_mux, &ss);
219
220 unsigned long sys_time = 1000;
221
224 EXPECT_EQ(state_machine.get_state(), CAR_STATE::ENABLING_INVERTERS);
225
227 state_machine.tick_state_machine(sys_time, dummy_state);
228
230 EXPECT_EQ(state_machine.get_state(), CAR_STATE::WAITING_READY_TO_DRIVE_SOUND);
231 sys_time += 20;
232
234 state_machine.tick_state_machine(sys_time, dummy_state);
235
236 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_NOT_ACTIVE);
237}
void activate_buzzer(unsigned long act_time)
Definition: Buzzer.cpp:8
◆ TEST() [4/7]
| TEST | ( | MCUStateMachineTesting | , |
| test_state_machine_rtd_state_transitions_to_ts_active | |||
| ) |
Definition at line 240 of file state_machine_test.h.
241{
242
243 int mock;
244 AMSInterface ams(&mock, 0, 0, 0, 0, 0);
248 PedalsSystem pedals({}, {});
249 DashboardInterface dash_interface;
250 TCMuxType tc_mux({static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c)}, {true, true, true, true, true});
251 ;
252
253 SafetySystem ss(&ams, 0);
254 MCUStateMachine<DrivetrainMock> state_machine(&buzzer, &drivetrain, &dash_interface, &pedals, &tc_mux, &ss);
255
256 unsigned long sys_time = 1000;
257
259 EXPECT_EQ(state_machine.get_state(), CAR_STATE::ENABLING_INVERTERS);
260
261 sys_time += 70;
264 state_machine.tick_state_machine(sys_time, dummy_state);
265 EXPECT_EQ(state_machine.get_state(), CAR_STATE::WAITING_READY_TO_DRIVE_SOUND);
266 sys_time += 70;
268
269 dash_interface.buzzer = true;
270 state_machine.tick_state_machine(sys_time, dummy_state);
271 dash_interface.buzzer = false;
272 state_machine.tick_state_machine(sys_time, dummy_state);
273
274 EXPECT_EQ(state_machine.get_state(), CAR_STATE::READY_TO_DRIVE);
275
276 state_machine.tick_state_machine(sys_time, dummy_state);
277
278 EXPECT_EQ(state_machine.get_state(), CAR_STATE::READY_TO_DRIVE);
279
281
282 state_machine.tick_state_machine(sys_time, dummy_state);
283
284 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_ACTIVE);
285}
@ TRACTIVE_SYSTEM_ACTIVE
◆ TEST() [5/7]
| TEST | ( | MCUStateMachineTesting | , |
| test_state_machine_rtd_state_transitions_to_ts_not_active | |||
| ) |
Definition at line 287 of file state_machine_test.h.
288{
289
290 int mock;
291 AMSInterface ams(&mock, 0, 0, 0, 0, 0);
295 PedalsSystem pedals({}, {});
296 DashboardInterface dash_interface;
297
298 TCMuxType tc_mux({static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c)}, {true, true, true, true, true});
299 ;
300
301 SafetySystem ss(&ams, 0);
302 MCUStateMachine<DrivetrainMock> state_machine(&buzzer, &drivetrain, &dash_interface, &pedals, &tc_mux, &ss);
303
304 unsigned long sys_time = 1000;
305
307 EXPECT_EQ(state_machine.get_state(), CAR_STATE::ENABLING_INVERTERS);
308
309 sys_time += 70;
312 state_machine.tick_state_machine(sys_time, dummy_state);
313 EXPECT_EQ(state_machine.get_state(), CAR_STATE::WAITING_READY_TO_DRIVE_SOUND);
314 sys_time += 70;
316
317 dash_interface.buzzer = true;
318 state_machine.tick_state_machine(sys_time, dummy_state);
319 dash_interface.buzzer = false;
320 state_machine.tick_state_machine(sys_time, dummy_state);
321
322 EXPECT_EQ(state_machine.get_state(), CAR_STATE::READY_TO_DRIVE);
323
324 state_machine.tick_state_machine(sys_time, dummy_state);
325
326 EXPECT_EQ(state_machine.get_state(), CAR_STATE::READY_TO_DRIVE);
327
328 // drivetrain.drivetrain_error_ = true;
329
331 state_machine.tick_state_machine(sys_time, dummy_state);
332
333 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_NOT_ACTIVE);
334}
◆ TEST() [6/7]
| TEST | ( | MCUStateMachineTesting | , |
| test_state_machine_tractive_system_activation | |||
| ) |
Definition at line 85 of file state_machine_test.h.
86{
87 int mock;
88 AMSInterface ams(&mock, 0, 0, 0, 0, 0);
91 PedalsSystem pedals({}, {});
92 DashboardInterface dash_interface;
93
94 TCMuxType tc_mux({static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c)}, {true, true, true, true, true});
95
96 SafetySystem ss(&ams, 0);
97 MCUStateMachine<DrivetrainMock> state_machine(&buzzer, &drivetrain, &dash_interface, &pedals, &tc_mux, &ss);
98 unsigned long sys_time = 1000;
99
100 // ticking without hv over threshold testing and ensuring the tractive system not active still
101 state_machine.tick_state_machine(sys_time, dummy_state);
102 sys_time += 1;
104 state_machine.tick_state_machine(sys_time, dummy_state);
105 sys_time += 1;
106 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_NOT_ACTIVE);
107
108 // hv going over threshold -> tractive system
110 sys_time += 1;
111 state_machine.tick_state_machine(sys_time, dummy_state);
112 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_ACTIVE);
113
114 // hv going under thresh -> tractive system not active
116 sys_time += 1;
117 state_machine.tick_state_machine(sys_time, dummy_state);
118 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_NOT_ACTIVE);
119}
◆ TEST() [7/7]
| TEST | ( | MCUStateMachineTesting | , |
| test_state_machine_tractive_system_enabling | |||
| ) |
Definition at line 121 of file state_machine_test.h.
122{
123 unsigned long sys_time = 1000;
124
125 int mock;
126 AMSInterface ams(&mock, 0, 0, 0, 0, 0);
129 PedalsSystem pedals({}, {});
130 DashboardInterface dash_interface;
131
132 TCMuxType tc_mux({static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c), static_cast<Controller *>(&c)}, {true, true, true, true, true});
133 ;
134 SafetySystem ss(&ams, 0);
135 MCUStateMachine<DrivetrainMock> state_machine(&buzzer, &drivetrain, &dash_interface, &pedals, &tc_mux, &ss);
136
137 // ticking without hv over threshold testing and ensuring the tractive system not active still
138 state_machine.tick_state_machine(sys_time, dummy_state);
139 sys_time += 1;
141 state_machine.tick_state_machine(sys_time, dummy_state);
142 sys_time += 1;
143 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_NOT_ACTIVE);
144
145 // hv going over threshold -> tractive system
147 sys_time += 1;
148 state_machine.tick_state_machine(sys_time, dummy_state);
149 EXPECT_EQ(state_machine.get_state(), CAR_STATE::TRACTIVE_SYSTEM_ACTIVE);
150
151 sys_time += 1;
152 dash_interface.start_button_status_ = true;
153
154 AnalogConversion_s pedals1_data;
155 pedals1_data.raw = 0;
156 pedals1_data.conversion = 0;
157 pedals1_data.status = AnalogSensorStatus_e::ANALOG_SENSOR_GOOD;
158 auto pedals2_data = pedals1_data;
159
160 AnalogConversion_s pedals3_data;
161 pedals3_data.raw = 3000;
162 pedals3_data.conversion = 1.0;
163 pedals3_data.status = pedals1_data.status;
164 auto pedals4_data = pedals3_data;
165 pedals.tick(SysTick_s{}, pedals1_data, pedals2_data, pedals3_data, pedals4_data);
166 state_machine.tick_state_machine(sys_time, dummy_state);
167 EXPECT_EQ(state_machine.get_state(), CAR_STATE::ENABLING_INVERTERS);
168}
Variable Documentation
◆ c
Definition at line 35 of file state_machine_test.h.