#include <TorqueControllerMux.h>
Public Member Functions | |
| TorqueControllerMux ()=delete | |
| TorqueControllerMux (std::array< Controller *, num_controllers > controller_pointers, std::array< bool, num_controllers > mux_bypass_limits, float max_change_speed=TC_MUX_DEFAULT_PARAMS::MAX_SPEED_FOR_MODE_CHANGE, float max_torque_pos_change_delta=TC_MUX_DEFAULT_PARAMS::MAX_TORQUE_DELTA_FOR_MODE_CHANGE, float max_power_limit=TC_MUX_DEFAULT_PARAMS::MAX_POWER_LIMIT) | |
| constructor for the TC mux More... | |
| const TorqueControllerMuxStatus & | get_tc_mux_status () |
| DrivetrainCommand_s | getDrivetrainCommand (ControllerMode_e requested_controller_type, TorqueLimit_e controller_command_torque_limit, const SharedCarState_s &input_state) |
| function that evaluates the mux, controllers and gets the active command More... | |
Private Member Functions | |
| TorqueControllerMuxError | can_switch_controller_ (DrivetrainDynamicReport_s active_drivetrain_data, DrivetrainCommand_s previous_controller_command, DrivetrainCommand_s desired_controller_out) |
| DrivetrainCommand_s | apply_positive_speed_limit_ (const DrivetrainCommand_s &command) |
| Clamps negative rpms to 0f. More... | |
| DrivetrainCommand_s | apply_torque_limit_ (const DrivetrainCommand_s &command, float max_torque) |
| Ensure torque is at most at the specified limit. If exceeding, then limit it in the returned DrivetrainCommand_s. More... | |
| DrivetrainCommand_s | apply_power_limit_ (const DrivetrainCommand_s &command, const DrivetrainDynamicReport_s &drivetrain, float power_limit, float max_torque) |
| Apply power limit (watts) such that the mechanical power of all wheels never exceeds the preset mechanical power limit. Scales all wheels down to preserve functionality of torque controllers. More... | |
| DrivetrainCommand_s | apply_regen_limit_ (const DrivetrainCommand_s &command, const DrivetrainDynamicReport_s &drivetrain_data) |
| begin limiting regen at noRegenLimitKPH (hardcoded in func) and completely limit regen at fullRegenLimitKPH (hardcoded in func) More... | |
Private Attributes | |
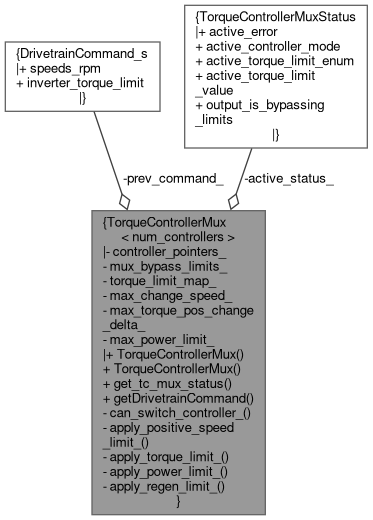
| std::array< Controller *, num_controllers > | controller_pointers_ |
| std::array< bool, num_controllers > | mux_bypass_limits_ |
| std::unordered_map< TorqueLimit_e, float > | torque_limit_map_ |
| float | max_change_speed_ |
| float | max_torque_pos_change_delta_ |
| float | max_power_limit_ |
| DrivetrainCommand_s | prev_command_ = {} |
| TorqueControllerMuxStatus | active_status_ = {} |
Detailed Description
class TorqueControllerMux< num_controllers >
Definition at line 60 of file TorqueControllerMux.h.
Constructor & Destructor Documentation
◆ TorqueControllerMux() [1/2]
|
delete |
◆ TorqueControllerMux() [2/2]
|
inlineexplicit |
constructor for the TC mux
- Parameters
-
controller_pointers the array of pointers to the controllers being muxed between mux_bypass_limits the array of aligned bools for determining if the limits should be applied to the controller outputs defaults to TC_MUX_DEFAULT_PARAMS::MAX_SPEED_FOR_MODE_CHANGE max_change_speed the max speed difference between the requested controller output and the actual speed of each wheel that if the controller has a diff larger than the mux will not switch to the requested controller max_torque_pos_change_delta same as speed but evaluated between the controller commanded torques defaults to TC_MUX_DEFAULT_PARAMS::MAX_TORQUE_DELTA_FOR_MODE_CHANGE max_power_limit the max power limit defaults to TC_MUX_DEFAULT_PARAMS::MAX_POWER_LIMIT
- Note
- TC Mux must be created with at least 1 controller.
Definition at line 116 of file TorqueControllerMux.h.
Member Function Documentation
◆ apply_positive_speed_limit_()
|
private |
Clamps negative rpms to 0f.
- Parameters
-
const DrivetrainCommand_s &command provides the rpm info as a DrivetrainCommand_s
- Returns
- DrivetrainCommand_s to update the drivetrain command in the getDrivetrainCommand method
◆ apply_power_limit_()
|
private |
Apply power limit (watts) such that the mechanical power of all wheels never exceeds the preset mechanical power limit. Scales all wheels down to preserve functionality of torque controllers.
- Parameters
-
const DrivetrainCommand_s &command provides torque info, which is used to calculate mechanical power const DrivetrainDynamicReport_s &drivetrain provides RPMS, which are used to calculate radians / s float max_torque is used to indirectly specifiy the max power
- Returns
- DrivetrainCommand_s to update the drivetrain command in the getDrivetrainCommand method
◆ apply_regen_limit_()
|
private |
begin limiting regen at noRegenLimitKPH (hardcoded in func) and completely limit regen at fullRegenLimitKPH (hardcoded in func)
- Parameters
-
const DrivetrainCommand_s &command const DrivetrainDynamicReport_s &drivetrain_data provides RPMs
- Returns
- DrivetrainCommand_s to update the drivetrain command in the getDrivetrainCommand method
◆ apply_torque_limit_()
|
private |
Ensure torque is at most at the specified limit. If exceeding, then limit it in the returned DrivetrainCommand_s.
- Parameters
-
const DrivetrainCommand_s &command is a DrivetrainCommand_s, which provides torque info float max_torque this is the maximum average torque the wheels are allowed to experience before it is limited.
- Returns
- DrivetrainCommand_s to update the drivetrain command in the getDrivetrainCommand method
◆ can_switch_controller_()
|
private |
◆ get_tc_mux_status()
|
inline |
Definition at line 132 of file TorqueControllerMux.h.
◆ getDrivetrainCommand()
| DrivetrainCommand_s TorqueControllerMux< num_controllers >::getDrivetrainCommand | ( | ControllerMode_e | requested_controller_type, |
| TorqueLimit_e | controller_command_torque_limit, | ||
| const SharedCarState_s & | input_state | ||
| ) |
function that evaluates the mux, controllers and gets the active command
- Parameters
-
requested_controller_type the requested controller type from the dial state controller_command_torque_limit the torque limit state enum set by dashboard input_state the active state of the car
- Returns
- the active DrivetrainCommand_s to be sent to the drivetrain to command increases and decreases in torque
Member Data Documentation
◆ active_status_
|
private |
Definition at line 77 of file TorqueControllerMux.h.
◆ controller_pointers_
|
private |
Definition at line 67 of file TorqueControllerMux.h.
◆ max_change_speed_
|
private |
Definition at line 75 of file TorqueControllerMux.h.
◆ max_power_limit_
|
private |
Definition at line 75 of file TorqueControllerMux.h.
◆ max_torque_pos_change_delta_
|
private |
Definition at line 75 of file TorqueControllerMux.h.
◆ mux_bypass_limits_
|
private |
Definition at line 69 of file TorqueControllerMux.h.
◆ prev_command_
|
private |
Definition at line 76 of file TorqueControllerMux.h.
◆ torque_limit_map_
|
private |
Definition at line 71 of file TorqueControllerMux.h.
The documentation for this class was generated from the following file:
- lib/systems/include/TorqueControllerMux.h