#include <stdint.h>#include "Utility.h"#include "SysClock.h"#include "SharedFirmwareTypes.h"#include "DrivebrainData.h"
Include dependency graph for SharedDataTypes.h:
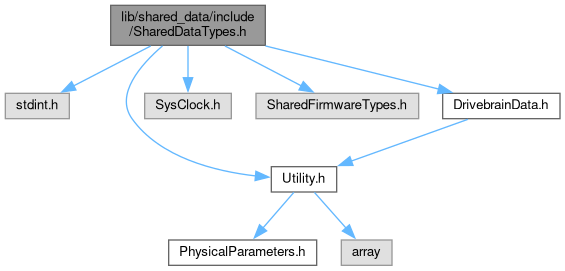
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | PedalsSystemData_s |
| struct | DrivetrainDynamicReport_s |
| struct | DrivetrainCommand_s |
| Stores setpoints for a command to the Drivetrain, containing speed and torque setpoints for each motor. These setpoints are defined in the torque controllers cycled by the TC Muxer. The Speeds unit is rpm and are the targeted speeds for each wheel of the car. The torques unit is nm and is the max torque requested from the inverter to reach such speeds. One can use the arrays with FR(Front Left), FL(Front Left), RL(Rear Left), RR(Rear Right) to access or modify the respective set points. eg. speeds_rpm[FR] = 0.0; Their indexes are defined in utility.h as follows: FL = 0, FR = 1, RL = 2, RR = 3. More... | |
| struct | TorqueControllerOutput_s |
| Packages drivetrain command with ready boolean to give feedback on controller successfully evaluating. More... | |
| struct | VectornavData_s |
| struct | TorqueControllerMuxStatus |
| packages TC Mux indicators: errors, mode, torque limit, bypass More... | |
| struct | LoadCellInterfaceOutput_s |
| struct | LoadCellInterfaceRawOutput_s |
| struct | SteeringSystemData_s |
| struct | SharedCarState_s |
| car state struct that contains state of everything about the car including More... | |
Typedefs | |
| using | speed_rpm = float |
| using | torque_nm = float |
Enumerations | |
| enum class | TorqueLimit_e { TCMUX_FULL_TORQUE = 0 , TCMUX_MID_TORQUE = 1 , TCMUX_LOW_TORQUE = 2 , TCMUX_NUM_TORQUE_LIMITS = 3 } |
| Defines modes of torque limit to be processed in torque limit map for exact values. More... | |
| enum class | ControllerMode_e { MODE_0 , MODE_1 , MODE_2 , MODE_3 , MODE_4 , MODE_5 } |
| enum class | TorqueControllerMuxError { NO_ERROR = 0 , ERROR_SPEED_DIFF_TOO_HIGH = 1 , ERROR_TORQUE_DIFF_TOO_HIGH = 2 , ERROR_CONTROLLER_INDEX_OUT_OF_BOUNDS =3 , ERROR_CONTROLLER_NULL_POINTER =4 } |
| Defines errors for TC Mux to use to maintain system safety. More... | |
| enum class | SteeringSystemStatus_e { STEERING_SYSTEM_NOMINAL = 0 , STEERING_SYSTEM_MARGINAL = 1 , STEERING_SYSTEM_DEGRADED = 2 , STEERING_SYSTEM_ERROR = 3 } |
Typedef Documentation
◆ speed_rpm
| using speed_rpm = float |
Definition at line 9 of file SharedDataTypes.h.
◆ torque_nm
| using torque_nm = float |
Definition at line 10 of file SharedDataTypes.h.
Enumeration Type Documentation
◆ ControllerMode_e
|
strong |
◆ SteeringSystemStatus_e
|
strong |
| Enumerator | |
|---|---|
| STEERING_SYSTEM_NOMINAL | |
| STEERING_SYSTEM_MARGINAL | |
| STEERING_SYSTEM_DEGRADED | |
| STEERING_SYSTEM_ERROR | |
Definition at line 129 of file SharedDataTypes.h.
130{
131 STEERING_SYSTEM_NOMINAL = 0,
132 STEERING_SYSTEM_MARGINAL = 1,
133 STEERING_SYSTEM_DEGRADED = 2,
134 STEERING_SYSTEM_ERROR = 3,
135};
◆ TorqueControllerMuxError
|
strong |
Defines errors for TC Mux to use to maintain system safety.
| Enumerator | |
|---|---|
| NO_ERROR | |
| ERROR_SPEED_DIFF_TOO_HIGH | |
| ERROR_TORQUE_DIFF_TOO_HIGH | |
| ERROR_CONTROLLER_INDEX_OUT_OF_BOUNDS | |
| ERROR_CONTROLLER_NULL_POINTER | |
Definition at line 97 of file SharedDataTypes.h.
◆ TorqueLimit_e
|
strong |
Defines modes of torque limit to be processed in torque limit map for exact values.
| Enumerator | |
|---|---|
| TCMUX_FULL_TORQUE | |
| TCMUX_MID_TORQUE | |
| TCMUX_LOW_TORQUE | |
| TCMUX_NUM_TORQUE_LIMITS | |
Definition at line 13 of file SharedDataTypes.h.
14{
15 TCMUX_FULL_TORQUE = 0,
16 TCMUX_MID_TORQUE = 1,
17 TCMUX_LOW_TORQUE = 2,
18 TCMUX_NUM_TORQUE_LIMITS = 3,
19};