#include <DashboardInterface.h>
Public Member Functions | |
| DashboardInterface (CANBufferType *msg_output_queue) | |
| void | read (const CAN_message_t &can_msg) |
| CAN_message_t | write () |
| void | tick10 (MCUInterface *mcu, int car_state, bool buzzer, bool drivetrain_error, TorqueLimit_e torque, float min_cell_voltage, AnalogConversion_s glv_voltage, int launch_state, ControllerMode_e dial_mode) |
| ControllerMode_e | getDialMode () |
| TorqueLimit_e | getTorqueLimitMode () |
| bool | safetySystemOK () |
| bool | startButtonPressed () |
| bool | specialButtonPressed () |
| bool | torqueModeButtonPressed () |
| bool | inverterResetButtonPressed () |
| bool | launchControlButtonPressed () |
| bool | torqueLoadingButtonPressed () |
| bool | nightModeButtonPressed () |
| bool | leftShifterButtonPressed () |
| bool | rightShifterButtonPressed () |
| bool | shutdownHAboveThreshold () |
| void | soundBuzzer (bool s) |
| bool | checkBuzzer () |
| void | setLED (DashLED_e led, LEDColors_e color) |
| ControllerMode_e | getDialMode () |
| TorqueLimit_e | getTorqueLimitMode () |
| bool | startButtonPressed () |
| bool | checkBuzzer () |
Public Attributes | |
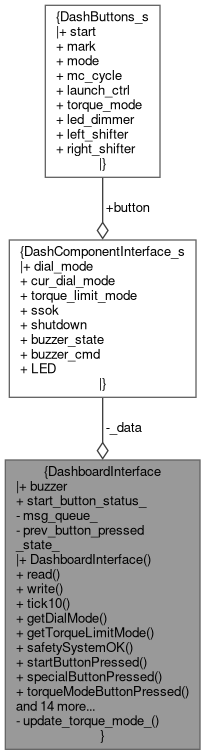
| bool | buzzer = false |
| bool | start_button_status_ |
Private Member Functions | |
| void | update_torque_mode_ (bool button_pressed) |
Private Attributes | |
| CANBufferType * | msg_queue_ |
| DashComponentInterface_s | _data |
| bool | prev_button_pressed_state_ |
Detailed Description
Definition at line 82 of file DashboardInterface.h.
Constructor & Destructor Documentation
◆ DashboardInterface()
|
inline |
Constructor for new DashboardInterface, All that it is inited with is the pointer to the telem circular buffer that is used to write new messages
- Parameters
-
msg_output_queue Pointer to the telem CAN circular buffer
Definition at line 99 of file DashboardInterface.h.
Member Function Documentation
◆ checkBuzzer() [1/2]
| bool DashboardInterface::checkBuzzer | ( | ) |
Definition at line 160 of file DashboardInterface.cpp.
◆ checkBuzzer() [2/2]
|
inline |
Definition at line 41 of file DashboardInterface.h.
◆ getDialMode() [1/2]
| ControllerMode_e DashboardInterface::getDialMode | ( | ) |
getter for the dashboard's current dial position (drive profile)
- Returns
- returns a ControllerMode_e enum with the current dial position
Definition at line 145 of file DashboardInterface.cpp.
◆ getDialMode() [2/2]
|
inline |
Definition at line 38 of file DashboardInterface.h.
◆ getTorqueLimitMode() [1/2]
| TorqueLimit_e DashboardInterface::getTorqueLimitMode | ( | ) |
Definition at line 146 of file DashboardInterface.cpp.
◆ getTorqueLimitMode() [2/2]
|
inline |
Definition at line 39 of file DashboardInterface.h.
◆ inverterResetButtonPressed()
| bool DashboardInterface::inverterResetButtonPressed | ( | ) |
Definition at line 150 of file DashboardInterface.cpp.
◆ launchControlButtonPressed()
| bool DashboardInterface::launchControlButtonPressed | ( | ) |
Definition at line 151 of file DashboardInterface.cpp.
◆ leftShifterButtonPressed()
| bool DashboardInterface::leftShifterButtonPressed | ( | ) |
Definition at line 153 of file DashboardInterface.cpp.
◆ nightModeButtonPressed()
| bool DashboardInterface::nightModeButtonPressed | ( | ) |
Definition at line 152 of file DashboardInterface.cpp.
◆ read()
| void DashboardInterface::read | ( | const CAN_message_t & | can_msg | ) |
read function will take in a reference to a new CAN message, unpack it, and will store all of the information into the DashComponentInterface for later access
- Parameters
-
can_msg is the reference to a new CAN message CAN_message_t
Definition at line 3 of file DashboardInterface.cpp.
◆ rightShifterButtonPressed()
| bool DashboardInterface::rightShifterButtonPressed | ( | ) |
Definition at line 154 of file DashboardInterface.cpp.
◆ safetySystemOK()
| bool DashboardInterface::safetySystemOK | ( | ) |
Definition at line 156 of file DashboardInterface.cpp.
◆ setLED()
| void DashboardInterface::setLED | ( | DashLED_e | led, |
| LEDColors_e | color | ||
| ) |
setter for the dash LEDs
- Parameters
-
led DashLED_e enum that corresponds to the LED's value in the LED array color LEDColors_e enum that corresponds to the color/state of the set LED
Definition at line 78 of file DashboardInterface.cpp.
◆ shutdownHAboveThreshold()
| bool DashboardInterface::shutdownHAboveThreshold | ( | ) |
Definition at line 157 of file DashboardInterface.cpp.
◆ soundBuzzer()
| void DashboardInterface::soundBuzzer | ( | bool | s | ) |
Definition at line 159 of file DashboardInterface.cpp.
◆ specialButtonPressed()
| bool DashboardInterface::specialButtonPressed | ( | ) |
Definition at line 148 of file DashboardInterface.cpp.
◆ startButtonPressed() [1/2]
| bool DashboardInterface::startButtonPressed | ( | ) |
Definition at line 147 of file DashboardInterface.cpp.
◆ startButtonPressed() [2/2]
|
inline |
Definition at line 40 of file DashboardInterface.h.
◆ tick10()
| void DashboardInterface::tick10 | ( | MCUInterface * | mcu, |
| int | car_state, | ||
| bool | buzzer, | ||
| bool | drivetrain_error, | ||
| TorqueLimit_e | torque, | ||
| float | min_cell_voltage, | ||
| AnalogConversion_s | glv_voltage, | ||
| int | launch_state, | ||
| ControllerMode_e | dial_mode | ||
| ) |
Definition at line 84 of file DashboardInterface.cpp.
◆ torqueLoadingButtonPressed()
| bool DashboardInterface::torqueLoadingButtonPressed | ( | ) |
◆ torqueModeButtonPressed()
| bool DashboardInterface::torqueModeButtonPressed | ( | ) |
Definition at line 149 of file DashboardInterface.cpp.
◆ update_torque_mode_()
|
private |
Definition at line 30 of file DashboardInterface.cpp.
◆ write()
| CAN_message_t DashboardInterface::write | ( | ) |
Definition at line 41 of file DashboardInterface.cpp.
Member Data Documentation
◆ _data
|
private |
Definition at line 88 of file DashboardInterface.h.
◆ buzzer
| bool DashboardInterface::buzzer = false |
Definition at line 36 of file DashboardInterface.h.
◆ msg_queue_
|
private |
Definition at line 86 of file DashboardInterface.h.
◆ prev_button_pressed_state_
|
private |
Definition at line 89 of file DashboardInterface.h.
◆ start_button_status_
| bool DashboardInterface::start_button_status_ |
Definition at line 37 of file DashboardInterface.h.
The documentation for this class was generated from the following files:
- lib/interfaces/include/DashboardInterface.h
- lib/mock_interfaces/DashboardInterface.h
- lib/interfaces/src/DashboardInterface.cpp