#include <PedalsSystem.h>
Public Member Functions | |
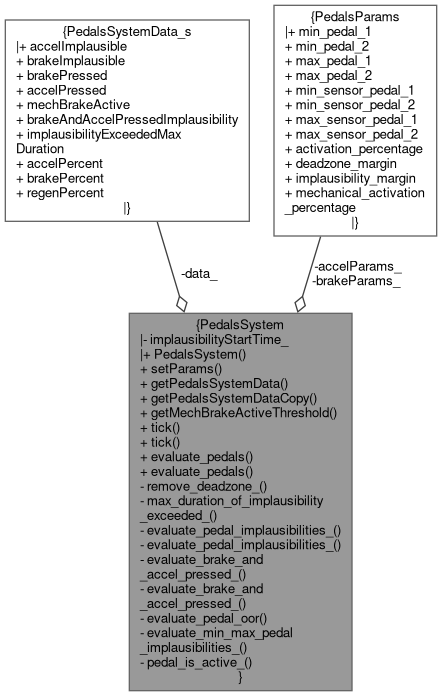
| PedalsSystem (const PedalsParams &accelParams, const PedalsParams &brakeParams) | |
| pedals system class that evaluates pedals for both accel and brake percent as well as implausibilities More... | |
| void | setParams (const PedalsParams &accelParams, const PedalsParams &brakeParams) |
| const PedalsSystemData_s & | getPedalsSystemData () |
| PedalsSystemData_s | getPedalsSystemDataCopy () |
| float | getMechBrakeActiveThreshold () |
| void | tick (const SysTick_s &tick, const AnalogConversion_s &accel1, const AnalogConversion_s &accel2, const AnalogConversion_s &brake) |
| overloaded tick function that runs the evaluation of the pedals system. evaluates brake using only min and max params for sensor 1 (min_pedal_1 / max_pedal_1). More... | |
| void | tick (const SysTick_s &tick, const AnalogConversion_s &accel1, const AnalogConversion_s &accel2, const AnalogConversion_s &brake1, const AnalogConversion_s &brake2) |
| PedalsSystemData_s | evaluate_pedals (const AnalogConversion_s &accel1, const AnalogConversion_s &accel2, const AnalogConversion_s &brake1, const AnalogConversion_s &brake2, unsigned long curr_time) |
| PedalsSystemData_s | evaluate_pedals (const AnalogConversion_s &accel1, const AnalogConversion_s &accel2, const AnalogConversion_s &brake, unsigned long curr_time) |
Private Member Functions | |
| float | remove_deadzone_ (float conversion_input, float deadzone) |
| bool | max_duration_of_implausibility_exceeded_ (unsigned long curr_time) |
| bool | evaluate_pedal_implausibilities_ (const AnalogConversion_s &pedalData1, const AnalogConversion_s &pedalData2, const PedalsParams ¶ms, float max_percent_diff) |
| Evaluate pedal implausibilities_ determines if there is a software implausibility in the pedals caused by them going out of range. Our max/min sensor ranges are calcuated from the pedal min/max values The pedal min/max values are defined in MCU_defs and are the real world raw values that we determine from the pedal output. The max/min sensor values are then a certain percent higher than these real world values as determined by the implausibility margin. This protects against physical damage to the sensor or pedal, but will not accidentally trip implausibility if pedal values fluctuate. More... | |
| bool | evaluate_pedal_implausibilities_ (const AnalogConversion_s &pedalData, const PedalsParams ¶ms) |
| overloaded pedal implaus check that doesnt need to check for percent diff between sensors since only one sensor More... | |
| bool | evaluate_brake_and_accel_pressed_ (const AnalogConversion_s &accelPedalData1, const AnalogConversion_s &accelPedalData2, const AnalogConversion_s &brakePedalData1, const AnalogConversion_s &brakePedalData2) |
| function to determine if the pedals and the brakes are pressed at the same time. evaluates brake being pressed with mech brake activation threshold AFTER removing deadzones for both brake and accel More... | |
| bool | evaluate_brake_and_accel_pressed_ (const AnalogConversion_s &accelPedalData1, const AnalogConversion_s &accelPedalData2, const AnalogConversion_s &brakePedalData) |
| overloaded version that evaluates with only one brake pedal value More... | |
| bool | evaluate_pedal_oor (const AnalogConversion_s &pedalData, int min, int max) |
| This checks to see if any pedal sensor is out of range :(. More... | |
| bool | evaluate_min_max_pedal_implausibilities_ (const AnalogConversion_s &pedalData, int min, int max, float implaus_margin_scale) |
| bool | pedal_is_active_ (float pedal1ConvertedData, float pedal2ConvertedData, const PedalsParams ¶ms, bool check_mech_activation) |
| check whether or not pedal is active according to input parameters. returns true if either pedal is over threshold. removes the deadzone before checking. More... | |
Private Attributes | |
| PedalsSystemData_s | data_ {} |
| PedalsParams | accelParams_ {} |
| PedalsParams | brakeParams_ {} |
| unsigned long | implausibilityStartTime_ |
Detailed Description
Definition at line 41 of file PedalsSystem.h.
Constructor & Destructor Documentation
◆ PedalsSystem()
|
inline |
pedals system class that evaluates pedals for both accel and brake percent as well as implausibilities
- Parameters
-
accelParams accel pedal parameters. by rules, 2 sensors must be used for redundancy and evaluated w.r.t each other brakeParams brake pedal params. when used with only one pedal sensor, the pedal parameter evaluation for brakes only looks at the min and max for min_pedal_1 / max_pedal_1
Definition at line 48 of file PedalsSystem.h.
Member Function Documentation
◆ evaluate_brake_and_accel_pressed_() [1/2]
|
private |
overloaded version that evaluates with only one brake pedal value
- Parameters
-
accelPedalData1 accelPedalData2 brakePedalData
- Returns
Definition at line 205 of file PedalsSystem.cpp.
◆ evaluate_brake_and_accel_pressed_() [2/2]
|
private |
function to determine if the pedals and the brakes are pressed at the same time. evaluates brake being pressed with mech brake activation threshold AFTER removing deadzones for both brake and accel
- Parameters
-
accelPedalData1 accelPedalData2 brakePedalData1 brakePedalData2
- Returns
- true if accel and brake pressed at the same time, false otherwise
Definition at line 219 of file PedalsSystem.cpp.
◆ evaluate_min_max_pedal_implausibilities_()
|
private |
- Parameters
-
pedalData min max implaus_margin_scale
- Returns
Definition at line 151 of file PedalsSystem.cpp.
◆ evaluate_pedal_implausibilities_() [1/2]
|
private |
overloaded pedal implaus check that doesnt need to check for percent diff between sensors since only one sensor
- Parameters
-
pedalData params
- Returns
Definition at line 124 of file PedalsSystem.cpp.
◆ evaluate_pedal_implausibilities_() [2/2]
|
private |
Evaluate pedal implausibilities_ determines if there is a software implausibility in the pedals caused by them going out of range. Our max/min sensor ranges are calcuated from the pedal min/max values The pedal min/max values are defined in MCU_defs and are the real world raw values that we determine from the pedal output. The max/min sensor values are then a certain percent higher than these real world values as determined by the implausibility margin. This protects against physical damage to the sensor or pedal, but will not accidentally trip implausibility if pedal values fluctuate.
- Parameters
-
pedalData1 pedalData2 params max_percent_diff
- Returns
Definition at line 129 of file PedalsSystem.cpp.
◆ evaluate_pedal_oor()
|
private |
This checks to see if any pedal sensor is out of range :(.
- Parameters
-
PedalData The analog pedal Value
- Returns
Definition at line 251 of file PedalsSystem.cpp.
◆ evaluate_pedals() [1/2]
| PedalsSystemData_s PedalsSystem::evaluate_pedals | ( | const AnalogConversion_s & | accel1, |
| const AnalogConversion_s & | accel2, | ||
| const AnalogConversion_s & | brake, | ||
| unsigned long | curr_time | ||
| ) |
- Parameters
-
accel1 accel2 brake curr_time
- Returns
Definition at line 21 of file PedalsSystem.cpp.
◆ evaluate_pedals() [2/2]
| PedalsSystemData_s PedalsSystem::evaluate_pedals | ( | const AnalogConversion_s & | accel1, |
| const AnalogConversion_s & | accel2, | ||
| const AnalogConversion_s & | brake1, | ||
| const AnalogConversion_s & | brake2, | ||
| unsigned long | curr_time | ||
| ) |
- Parameters
-
accel1 accel2 brake1 brake2 curr_time
- Returns
Definition at line 64 of file PedalsSystem.cpp.
◆ getMechBrakeActiveThreshold()
|
inline |
Definition at line 72 of file PedalsSystem.h.
◆ getPedalsSystemData()
|
inline |
Definition at line 62 of file PedalsSystem.h.
◆ getPedalsSystemDataCopy()
|
inline |
Definition at line 67 of file PedalsSystem.h.
◆ max_duration_of_implausibility_exceeded_()
|
private |
Definition at line 111 of file PedalsSystem.cpp.
◆ pedal_is_active_()
|
private |
check whether or not pedal is active according to input parameters. returns true if either pedal is over threshold. removes the deadzone before checking.
- Parameters
-
pedal1ConvertedData the value 0 to 1 of the first pedal without deadzone removed pedal2ConvertedData ... second pedal 0 to 1 val params the pedal parameters for this specific pedal check_mech_activation if this is true, function will check percentages against the mechanical activation percentage
- Returns
- true or false accordingly
Definition at line 234 of file PedalsSystem.cpp.
◆ remove_deadzone_()
|
private |
Definition at line 189 of file PedalsSystem.cpp.
◆ setParams()
|
inline |
Definition at line 55 of file PedalsSystem.h.
◆ tick() [1/2]
| void PedalsSystem::tick | ( | const SysTick_s & | tick, |
| const AnalogConversion_s & | accel1, | ||
| const AnalogConversion_s & | accel2, | ||
| const AnalogConversion_s & | brake | ||
| ) |
overloaded tick function that runs the evaluation of the pedals system. evaluates brake using only min and max params for sensor 1 (min_pedal_1 / max_pedal_1).
- Parameters
-
tick current system time tick accel1 accel 1 sensor reading with scaled and offset value from 0 to 1 accel2 accel 2 sensor reading with scaled and offset value from 0 to 1 brake brake sensor reading with scaled and offset value from 0 to 1
Definition at line 12 of file PedalsSystem.cpp.
◆ tick() [2/2]
| void PedalsSystem::tick | ( | const SysTick_s & | tick, |
| const AnalogConversion_s & | accel1, | ||
| const AnalogConversion_s & | accel2, | ||
| const AnalogConversion_s & | brake1, | ||
| const AnalogConversion_s & | brake2 | ||
| ) |
- Parameters
-
tick accel1 accel2 brake1 brake2
Definition at line 7 of file PedalsSystem.cpp.
Member Data Documentation
◆ accelParams_
|
private |
Definition at line 125 of file PedalsSystem.h.
◆ brakeParams_
|
private |
Definition at line 126 of file PedalsSystem.h.
◆ data_
|
private |
Definition at line 124 of file PedalsSystem.h.
◆ implausibilityStartTime_
|
private |
Definition at line 127 of file PedalsSystem.h.
The documentation for this class was generated from the following files:
- lib/systems/include/PedalsSystem.h
- lib/systems/src/PedalsSystem.cpp