#include <DrivebrainETHInterface.h>
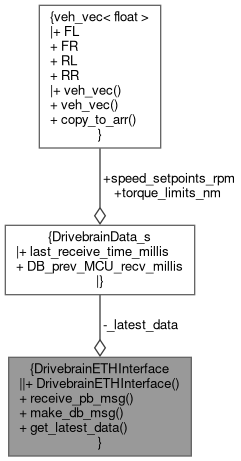
Collaboration diagram for DrivebrainETHInterface:
Public Member Functions | |
| DrivebrainETHInterface () | |
| void | receive_pb_msg (const hytech_msgs_MCUCommandData &msg_in, unsigned long curr_millis) |
| hytech_msgs_MCUOutputData | make_db_msg (const SharedCarState_s &shared_state) |
| DrivebrainData_s | get_latest_data () |
Private Attributes | |
| DrivebrainData_s | _latest_data = {} |
Detailed Description
Definition at line 6 of file DrivebrainETHInterface.h.
Constructor & Destructor Documentation
◆ DrivebrainETHInterface()
|
inline |
Definition at line 9 of file DrivebrainETHInterface.h.
9 {
12 };
DrivebrainData_s _latest_data
Definition: DrivebrainETHInterface.h:21
int64_t last_receive_time_millis
the latest time that the MCU received a message w.r.t the current tick's millis
Definition: DrivebrainData.h:9
int64_t DB_prev_MCU_recv_millis
the latest MCU last_receive_time_millis that the drivebrain received
Definition: DrivebrainData.h:11
Member Function Documentation
◆ get_latest_data()
|
inline |
Definition at line 17 of file DrivebrainETHInterface.h.
◆ make_db_msg()
| hytech_msgs_MCUOutputData DrivebrainETHInterface::make_db_msg | ( | const SharedCarState_s & | shared_state | ) |
Definition at line 5 of file DrivebrainETHInterface.cpp.
6{
7 hytech_msgs_MCUOutputData out;
10
11 out.has_rpm_data = true;
22 out.has_load_cell_data = true;
23
24 out.timing_failure_active = shared_state.drivebrain_timing_failure;
25 return out;
26}
speed_rpm measuredSpeeds[NUM_MOTORS]
Definition: SharedDataTypes.h:52
veh_vec< int > raw_load_cell_data
Definition: SharedDataTypes.h:125
◆ receive_pb_msg()
| void DrivebrainETHInterface::receive_pb_msg | ( | const hytech_msgs_MCUCommandData & | msg_in, |
| unsigned long | curr_millis | ||
| ) |
Definition at line 28 of file DrivebrainETHInterface.cpp.
29{
30 veh_vec<float> nm_lim(msg_in.torque_limit_nm.FL, msg_in.torque_limit_nm.FR, msg_in.torque_limit_nm.RL, msg_in.torque_limit_nm.RR);
31 veh_vec<float> speed_set(msg_in.desired_rpms.FL, msg_in.desired_rpms.FR, msg_in.desired_rpms.RL, msg_in.desired_rpms.RR);
36}
veh_vec< float > speed_setpoints_rpm
Definition: DrivebrainData.h:13
generic data vector type that can be used with tire and / or anything to do with 4 corners of the car...
Definition: Utility.h:17
Member Data Documentation
◆ _latest_data
|
private |
Definition at line 21 of file DrivebrainETHInterface.h.
The documentation for this class was generated from the following files:
- lib/interfaces/include/DrivebrainETHInterface.h
- lib/interfaces/src/DrivebrainETHInterface.cpp