#include <TelemetryInterface.h>
Public Member Functions | |
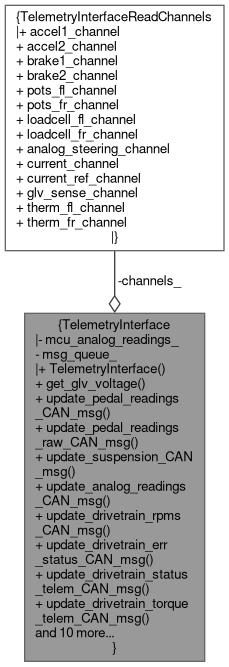
| TelemetryInterface (CANBufferType *msg_output_queue, const TelemetryInterfaceReadChannels &channels) | |
| AnalogConversion_s | get_glv_voltage (const AnalogConversionPacket_s< 8 > &adc1) |
| void | update_pedal_readings_CAN_msg (float accel_percent, float brake_percent, float mech_brake_percent) |
| void | update_pedal_readings_raw_CAN_msg (const AnalogConversion_s &accel_1, const AnalogConversion_s &accel_2, const AnalogConversion_s &brake_1, const AnalogConversion_s &brake_2) |
| void | update_suspension_CAN_msg (const AnalogConversion_s &lc_fl, const AnalogConversion_s &lc_fr, const AnalogConversion_s &pots_fl, const AnalogConversion_s &pots_fr) |
| void | update_analog_readings_CAN_msg (const SteeringEncoderConversion_s &steer1, const AnalogConversion_s &steer2, const AnalogConversion_s ¤t, const AnalogConversion_s &reference, const AnalogConversion_s &glv) |
| void | update_drivetrain_rpms_CAN_msg (InvInt_t *fl, InvInt_t *fr, InvInt_t *rl, InvInt_t *rr) |
| void | update_drivetrain_err_status_CAN_msg (InvInt_t *fl, InvInt_t *fr, InvInt_t *rl, InvInt_t *rr) |
| void | update_drivetrain_status_telem_CAN_msg (InvInt_t *fl, InvInt_t *fr, InvInt_t *rl, InvInt_t *rr, bool accel_implaus, bool brake_implaus, float accel_per, float brake_per) |
| void | update_drivetrain_torque_telem_CAN_msg (InvInt_t *fl, InvInt_t *fr, InvInt_t *rl, InvInt_t *rr) |
| void | update_drivetrain_torque_filter_out_telem_CAN_msg (InvInt_t *fl, InvInt_t *fr, InvInt_t *rl, InvInt_t *rr) |
| void | update_penthouse_accum_CAN_msg (const AnalogConversion_s ¤t, const AnalogConversion_s &reference) |
| void | update_steering_status_CAN_msg (const float steering_system_angle, const float filtered_angle_encoder, const float filtered_angle_analog, const uint8_t steering_system_status, const uint8_t steering_encoder_status, const uint8_t steering_analog_status) |
| template<typename T > | |
| void | enqueue_CAN (T can_msg, uint32_t id) |
| template<typename U > | |
| void | enqueue_new_CAN (U *structure, uint32_t(*pack_function)(U *, uint8_t *, uint8_t *, uint8_t *)) |
| void | tick (const AnalogConversionPacket_s< 8 > &adc1, const AnalogConversionPacket_s< 4 > &adc2, const AnalogConversionPacket_s< 4 > &adc3, const SteeringEncoderConversion_s &encoder, InvInt_t *fl, InvInt_t *fr, InvInt_t *rl, InvInt_t *rr, bool accel_implaus, bool brake_implaus, float accel_per, float brake_per, const AnalogConversion_s &accel_1, const AnalogConversion_s &accel_2, const AnalogConversion_s &brake_1, const AnalogConversion_s &brake_2, float mech_brake_active_percent, const TorqueControllerMuxError ¤t_mux_status) |
| TelemetryInterface () | |
| ~TelemetryInterface () | |
| void | update_TCMux_status_CAN_msg (const TCMuxStatus_s &tcMuxStatus) |
| void | update_steering_status_CAN_msg (const float steering_system_angle, const float filtered_angle_encoder, const float filtered_angle_analog, const uint8_t steering_system_status, const uint8_t steering_encoder_status, const uint8_t steering_analog_status) |
Private Attributes | |
| MCU_analog_readings | mcu_analog_readings_ |
| CANBufferType * | msg_queue_ |
| TelemetryInterfaceReadChannels | channels_ |
Detailed Description
Definition at line 37 of file TelemetryInterface.h.
Constructor & Destructor Documentation
◆ TelemetryInterface() [1/2]
|
inline |
Definition at line 48 of file TelemetryInterface.h.
◆ TelemetryInterface() [2/2]
|
inline |
Definition at line 13 of file TelemetryInterface.h.
◆ ~TelemetryInterface()
|
inline |
Definition at line 14 of file TelemetryInterface.h.
Member Function Documentation
◆ enqueue_CAN()
| void TelemetryInterface::enqueue_CAN | ( | T | can_msg, |
| uint32_t | id | ||
| ) |
Definition at line 226 of file TelemetryInterface.cpp.
◆ enqueue_new_CAN()
| void TelemetryInterface::enqueue_new_CAN | ( | U * | structure, |
| uint32_t(*)(U *, uint8_t *, uint8_t *, uint8_t *) | pack_function | ||
| ) |
Definition at line 241 of file TelemetryInterface.cpp.
◆ get_glv_voltage()
|
inline |
Definition at line 53 of file TelemetryInterface.h.
◆ tick()
| void TelemetryInterface::tick | ( | const AnalogConversionPacket_s< 8 > & | adc1, |
| const AnalogConversionPacket_s< 4 > & | adc2, | ||
| const AnalogConversionPacket_s< 4 > & | adc3, | ||
| const SteeringEncoderConversion_s & | encoder, | ||
| InvInt_t * | fl, | ||
| InvInt_t * | fr, | ||
| InvInt_t * | rl, | ||
| InvInt_t * | rr, | ||
| bool | accel_implaus, | ||
| bool | brake_implaus, | ||
| float | accel_per, | ||
| float | brake_per, | ||
| const AnalogConversion_s & | accel_1, | ||
| const AnalogConversion_s & | accel_2, | ||
| const AnalogConversion_s & | brake_1, | ||
| const AnalogConversion_s & | brake_2, | ||
| float | mech_brake_active_percent, | ||
| const TorqueControllerMuxError & | current_mux_status | ||
| ) |
Definition at line 252 of file TelemetryInterface.cpp.
◆ update_analog_readings_CAN_msg()
| void TelemetryInterface::update_analog_readings_CAN_msg | ( | const SteeringEncoderConversion_s & | steer1, |
| const AnalogConversion_s & | steer2, | ||
| const AnalogConversion_s & | current, | ||
| const AnalogConversion_s & | reference, | ||
| const AnalogConversion_s & | glv | ||
| ) |
Definition at line 47 of file TelemetryInterface.cpp.
◆ update_drivetrain_err_status_CAN_msg()
| void TelemetryInterface::update_drivetrain_err_status_CAN_msg | ( | InvInt_t * | fl, |
| InvInt_t * | fr, | ||
| InvInt_t * | rl, | ||
| InvInt_t * | rr | ||
| ) |
Definition at line 73 of file TelemetryInterface.cpp.
◆ update_drivetrain_rpms_CAN_msg()
| void TelemetryInterface::update_drivetrain_rpms_CAN_msg | ( | InvInt_t * | fl, |
| InvInt_t * | fr, | ||
| InvInt_t * | rl, | ||
| InvInt_t * | rr | ||
| ) |
Definition at line 62 of file TelemetryInterface.cpp.
◆ update_drivetrain_status_telem_CAN_msg()
| void TelemetryInterface::update_drivetrain_status_telem_CAN_msg | ( | InvInt_t * | fl, |
| InvInt_t * | fr, | ||
| InvInt_t * | rl, | ||
| InvInt_t * | rr, | ||
| bool | accel_implaus, | ||
| bool | brake_implaus, | ||
| float | accel_per, | ||
| float | brake_per | ||
| ) |
Definition at line 87 of file TelemetryInterface.cpp.
◆ update_drivetrain_torque_filter_out_telem_CAN_msg()
| void TelemetryInterface::update_drivetrain_torque_filter_out_telem_CAN_msg | ( | InvInt_t * | fl, |
| InvInt_t * | fr, | ||
| InvInt_t * | rl, | ||
| InvInt_t * | rr | ||
| ) |
Definition at line 178 of file TelemetryInterface.cpp.
◆ update_drivetrain_torque_telem_CAN_msg()
| void TelemetryInterface::update_drivetrain_torque_telem_CAN_msg | ( | InvInt_t * | fl, |
| InvInt_t * | fr, | ||
| InvInt_t * | rl, | ||
| InvInt_t * | rr | ||
| ) |
Definition at line 161 of file TelemetryInterface.cpp.
◆ update_pedal_readings_CAN_msg()
| void TelemetryInterface::update_pedal_readings_CAN_msg | ( | float | accel_percent, |
| float | brake_percent, | ||
| float | mech_brake_percent | ||
| ) |
Definition at line 5 of file TelemetryInterface.cpp.
◆ update_pedal_readings_raw_CAN_msg()
| void TelemetryInterface::update_pedal_readings_raw_CAN_msg | ( | const AnalogConversion_s & | accel_1, |
| const AnalogConversion_s & | accel_2, | ||
| const AnalogConversion_s & | brake_1, | ||
| const AnalogConversion_s & | brake_2 | ||
| ) |
Definition at line 18 of file TelemetryInterface.cpp.
◆ update_penthouse_accum_CAN_msg()
| void TelemetryInterface::update_penthouse_accum_CAN_msg | ( | const AnalogConversion_s & | current, |
| const AnalogConversion_s & | reference | ||
| ) |
Definition at line 196 of file TelemetryInterface.cpp.
◆ update_steering_status_CAN_msg() [1/2]
| void TelemetryInterface::update_steering_status_CAN_msg | ( | const float | steering_system_angle, |
| const float | filtered_angle_encoder, | ||
| const float | filtered_angle_analog, | ||
| const uint8_t | steering_system_status, | ||
| const uint8_t | steering_encoder_status, | ||
| const uint8_t | steering_analog_status | ||
| ) |
Definition at line 205 of file TelemetryInterface.cpp.
◆ update_steering_status_CAN_msg() [2/2]
|
inline |
Definition at line 20 of file TelemetryInterface.h.
◆ update_suspension_CAN_msg()
| void TelemetryInterface::update_suspension_CAN_msg | ( | const AnalogConversion_s & | lc_fl, |
| const AnalogConversion_s & | lc_fr, | ||
| const AnalogConversion_s & | pots_fl, | ||
| const AnalogConversion_s & | pots_fr | ||
| ) |
Definition at line 33 of file TelemetryInterface.cpp.
◆ update_TCMux_status_CAN_msg()
|
inline |
Definition at line 16 of file TelemetryInterface.h.
Member Data Documentation
◆ channels_
|
private |
Definition at line 45 of file TelemetryInterface.h.
◆ mcu_analog_readings_
|
private |
Definition at line 41 of file TelemetryInterface.h.
◆ msg_queue_
|
private |
Definition at line 43 of file TelemetryInterface.h.
The documentation for this class was generated from the following files:
- lib/interfaces/include/TelemetryInterface.h
- lib/mock_interfaces/TelemetryInterface.h
- lib/interfaces/src/TelemetryInterface.cpp