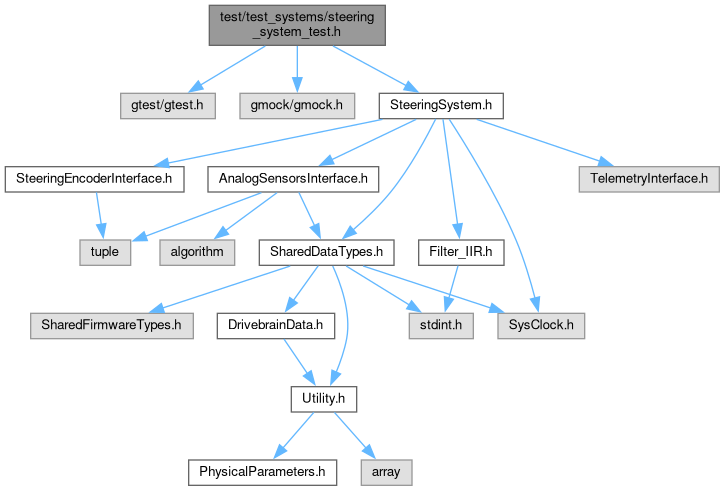
Include dependency graph for steering_system_test.h:
Go to the source code of this file.
Macros | |
| #define | PRIMARY_ALPHA (0.7) |
| #define | SECONDARY_ALPHA (0.7) |
| #define | WARN_DIVERGENCE_OFFSET (0.6) |
| #define | ERR_DIVERGENCE_OFFSET (0.7) |
| #define | WARN_FILTER_LATENCY (8) |
| #define | ERR_FILTER_LATENCY (9) |
Functions | |
| TEST (SteeringSystemTesting, test_steering_nominal) | |
| TEST (SteeringSystemTesting, test_steering_primary_is_marginal) | |
| TEST (SteeringSystemTesting, test_steering_secondary_is_marginal) | |
| TEST (SteeringSystemTesting, test_steering_divergence_warning) | |
| TEST (SteeringSystemTesting, test_steering_divergence_error) | |
| TEST (SteeringSystemTesting, test_steering_primary_is_missing) | |
| TEST (SteeringSystemTesting, test_steering_primary_is_missing_and_secondary_is_marginal) | |
Macro Definition Documentation
◆ ERR_DIVERGENCE_OFFSET
| #define ERR_DIVERGENCE_OFFSET (0.7) |
Definition at line 10 of file steering_system_test.h.
◆ ERR_FILTER_LATENCY
| #define ERR_FILTER_LATENCY (9) |
Definition at line 12 of file steering_system_test.h.
◆ PRIMARY_ALPHA
| #define PRIMARY_ALPHA (0.7) |
Definition at line 7 of file steering_system_test.h.
◆ SECONDARY_ALPHA
| #define SECONDARY_ALPHA (0.7) |
Definition at line 8 of file steering_system_test.h.
◆ WARN_DIVERGENCE_OFFSET
| #define WARN_DIVERGENCE_OFFSET (0.6) |
Definition at line 9 of file steering_system_test.h.
◆ WARN_FILTER_LATENCY
| #define WARN_FILTER_LATENCY (8) |
Definition at line 11 of file steering_system_test.h.
Function Documentation
◆ TEST() [1/7]
| TEST | ( | SteeringSystemTesting | , |
| test_steering_divergence_error | |||
| ) |
Definition at line 158 of file steering_system_test.h.
159{
160 // Boilerplate definitions for the testing aparatus
161 SysClock sys_clock;
162 SysTick_s sys_tick = sys_clock.tick(0);
163 SteeringEncoderInterface primarySensor;
164 TelemetryInterface telem_interface;
165 SteeringSystem steeringSystem(&primarySensor, &telem_interface, PRIMARY_ALPHA, SECONDARY_ALPHA);
166 // Filter refernce values for evaluation
168 float mockPrimaryFilteredAngle;
169 float mockSecondaryFilteredAngle;
170
171 float primaryAngle = 0.0f;
172 // Pend divergence to sensor readings
173 // - IIR filter eq.: filtered_val = (1-alpha)*new_val + alpha*prev_val
174 // - when divergence set exactly to system threshold
175 // - divergence magnitude gets shaved off, will not trigger above threshold
176 // - pend offset to divergence to trip threshold
177 float secondaryAngle = primaryAngle + ERR_DIVERGENCE_OFFSET + STEERING_DIVERGENCE_ERROR_THRESHOLD; // edge discrepancy
178
179 // Latency due to filtering
180 // - required steps of filtering for divergence to rise up to threshold with offset pended
181 // - e.g. when alpha = 0.7, pending offset = 0.6, it takes a minimal of 9 steps of filtering to exceed error threshold
183 {
184 mockPrimaryFilteredAngle = mockAngleFilters[0].filtered_result(primaryAngle);
185 mockSecondaryFilteredAngle = mockAngleFilters[1].filtered_result(secondaryAngle);
186
189 steeringSystem.tick(
190 (SteeringSystemTick_s)
191 {
192 .tick = sys_tick,
193 .secondaryConversion = (AnalogConversion_s)
194 {
195 .raw = 0,
196 .conversion = secondaryAngle,
197 .status = AnalogSensorStatus_e::ANALOG_SENSOR_GOOD
198 }
199 }
200 );
201 }
202
203 ASSERT_TRUE(steeringSystem.getSteeringSystemData().angle == 0.0f);
204 ASSERT_TRUE(steeringSystem.getSteeringSystemData().status == SteeringSystemStatus_e::STEERING_SYSTEM_ERROR);
205}
@ STEERING_ENCODER_NOMINAL
#define STEERING_DIVERGENCE_ERROR_THRESHOLD
Definition: SteeringSystem.h:15
Definition: Filter_IIR.h:11
SteeringEncoderConversion_s mockConversion
Definition: SteeringEncoderInterface.h:24
Definition: SteeringSystem.h:31
Definition: TelemetryInterface.h:38
SteeringEncoderStatus_e status
Definition: SteeringEncoderInterface.h:17
Definition: SteeringSystem.h:24
◆ TEST() [2/7]
| TEST | ( | SteeringSystemTesting | , |
| test_steering_divergence_warning | |||
| ) |
Definition at line 109 of file steering_system_test.h.
110{
111 // Boilerplate definitions for the testing aparatus
112 SysClock sys_clock;
113 SysTick_s sys_tick = sys_clock.tick(0);
114 SteeringEncoderInterface primarySensor;
115 TelemetryInterface telem_interface;
116 SteeringSystem steeringSystem(&primarySensor, &telem_interface, PRIMARY_ALPHA, SECONDARY_ALPHA);
117 // Filter refernce values for evaluation
119 float mockPrimaryFilteredAngle;
120 float mockSecondaryFilteredAngle;
121
122 float primaryAngle = 0.0f;
123 // Pend divergence to sensor readings
124 // - IIR filter eq.: filtered_val = (1-alpha)*new_val + alpha*prev_val
125 // - when divergence set exactly to system threshold
126 // - divergence magnitude gets shaved off, will not trigger above threshold
127 // - pend offset to divergence to trip threshold
128 float secondaryAngle = primaryAngle + WARN_DIVERGENCE_OFFSET + STEERING_DIVERGENCE_WARN_THRESHOLD; // edge discrepancy
129
130 // Latency due to filtering
131 // - required steps of filtering for divergence to rise up to threshold with offset pended
132 // - e.g. when alpha = 0.7, pending offset = 0.6, it takes a minimal of 8 steps of filtering to exceed warn threshold
134 {
135 mockPrimaryFilteredAngle = mockAngleFilters[0].filtered_result(primaryAngle);
136 mockSecondaryFilteredAngle = mockAngleFilters[1].filtered_result(secondaryAngle);
137
140 steeringSystem.tick(
141 (SteeringSystemTick_s)
142 {
143 .tick = sys_tick,
144 .secondaryConversion = (AnalogConversion_s)
145 {
146 .raw = 0,
147 .conversion = secondaryAngle,
148 .status = AnalogSensorStatus_e::ANALOG_SENSOR_GOOD
149 }
150 }
151 );
152 }
153
154 ASSERT_TRUE(steeringSystem.getSteeringSystemData().angle == mockPrimaryFilteredAngle);
155 ASSERT_TRUE(steeringSystem.getSteeringSystemData().status == SteeringSystemStatus_e::STEERING_SYSTEM_MARGINAL);
156}
#define STEERING_DIVERGENCE_WARN_THRESHOLD
Definition: SteeringSystem.h:16
◆ TEST() [3/7]
| TEST | ( | SteeringSystemTesting | , |
| test_steering_nominal | |||
| ) |
Definition at line 14 of file steering_system_test.h.
15{
16 float angles_to_test[5] = {-120.0f, -60.0f, 0.0f, 60.0f, 120.0f};
17 // Boilerplate definitions for the testing aparatus
18 SysClock sys_clock;
19 SysTick_s sys_tick = sys_clock.tick(0);
20 SteeringEncoderInterface primarySensor;
21 TelemetryInterface telem_interface;
23 // Filter refernce values for evaluation
25
26 // Sweep through a few angles where the sensors agree perfectly and check the system is nominal
27 for (float angle: angles_to_test)
28 {
31 steeringSystem.tick(
32 (SteeringSystemTick_s)
33 {
34 .tick = sys_tick,
35 .secondaryConversion = (AnalogConversion_s)
36 {
37 .raw = 0,
38 .conversion = angle,
39 .status = AnalogSensorStatus_e::ANALOG_SENSOR_GOOD
40 }
41 }
42 );
43
44 ASSERT_TRUE(steeringSystem.getSteeringSystemData().angle == mockAngleFilters[0].filtered_result(angle));
45 ASSERT_TRUE(steeringSystem.getSteeringSystemData().status == SteeringSystemStatus_e::STEERING_SYSTEM_NOMINAL);
46 }
47}
◆ TEST() [4/7]
| TEST | ( | SteeringSystemTesting | , |
| test_steering_primary_is_marginal | |||
| ) |
Definition at line 49 of file steering_system_test.h.
50{
51 // Boilerplate definitions for the testing aparatus
52 SysClock sys_clock;
53 SysTick_s sys_tick = sys_clock.tick(0);
54 SteeringEncoderInterface primarySensor;
55 TelemetryInterface telem_interface;
57 // Filter refernce values for evaluation
59 float angle = 0.0f;
60
63 steeringSystem.tick(
64 (SteeringSystemTick_s)
65 {
66 .tick = sys_tick,
67 .secondaryConversion = (AnalogConversion_s)
68 {
69 .raw = 0,
70 .conversion = angle,
71 .status = AnalogSensorStatus_e::ANALOG_SENSOR_GOOD
72 }
73 }
74 );
75 ASSERT_TRUE(steeringSystem.getSteeringSystemData().angle == mockAngleFilters[0].filtered_result(angle));
76 ASSERT_TRUE(steeringSystem.getSteeringSystemData().status == SteeringSystemStatus_e::STEERING_SYSTEM_MARGINAL);
77}
@ STEERING_ENCODER_MARGINAL
◆ TEST() [5/7]
| TEST | ( | SteeringSystemTesting | , |
| test_steering_primary_is_missing | |||
| ) |
Definition at line 207 of file steering_system_test.h.
208{
209 // Boilerplate definitions for the testing aparatus
210 SysClock sys_clock;
211 SysTick_s sys_tick = sys_clock.tick(0);
212 SteeringEncoderInterface primarySensor;
213 TelemetryInterface telem_interface;
214 SteeringSystem steeringSystem(&primarySensor, &telem_interface, PRIMARY_ALPHA, SECONDARY_ALPHA);
215 // Filter refernce values for evaluation
217 float angle = 100.0f;
218
221 steeringSystem.tick(
222 (SteeringSystemTick_s)
223 {
224 .tick = sys_tick,
225 .secondaryConversion = (AnalogConversion_s)
226 {
227 .raw = 0,
228 .conversion = angle,
229 .status = AnalogSensorStatus_e::ANALOG_SENSOR_GOOD
230 }
231 }
232 );
233 ASSERT_TRUE(steeringSystem.getSteeringSystemData().angle == mockAngleFilters[1].filtered_result(angle));
234 ASSERT_TRUE(steeringSystem.getSteeringSystemData().status == SteeringSystemStatus_e::STEERING_SYSTEM_DEGRADED);
235}
@ STEERING_ENCODER_ERROR
◆ TEST() [6/7]
| TEST | ( | SteeringSystemTesting | , |
| test_steering_primary_is_missing_and_secondary_is_marginal | |||
| ) |
Definition at line 237 of file steering_system_test.h.
238{
239 // Boilerplate definitions for the testing aparatus
240 SysClock sys_clock;
241 SysTick_s sys_tick = sys_clock.tick(0);
242 SteeringEncoderInterface primarySensor;
243 TelemetryInterface telem_interface;
244 SteeringSystem steeringSystem(&primarySensor, &telem_interface, PRIMARY_ALPHA, SECONDARY_ALPHA);
245 float angle = 100.0f;
246
249 steeringSystem.tick(
250 (SteeringSystemTick_s)
251 {
252 .tick = sys_tick,
253 .secondaryConversion = (AnalogConversion_s)
254 {
255 .raw = 0,
256 .conversion = angle,
257 .status = AnalogSensorStatus_e::ANALOG_SENSOR_CLAMPED
258 }
259 }
260 );
261 ASSERT_TRUE(steeringSystem.getSteeringSystemData().angle == 0.0f);
262 ASSERT_TRUE(steeringSystem.getSteeringSystemData().status == SteeringSystemStatus_e::STEERING_SYSTEM_ERROR);
263}
◆ TEST() [7/7]
| TEST | ( | SteeringSystemTesting | , |
| test_steering_secondary_is_marginal | |||
| ) |
Definition at line 79 of file steering_system_test.h.
80{
81 // Boilerplate definitions for the testing aparatus
82 SysClock sys_clock;
83 SysTick_s sys_tick = sys_clock.tick(0);
84 SteeringEncoderInterface primarySensor;
85 TelemetryInterface telem_interface;
87 // Filter refernce values for evaluation
89 float angle = 0.0f;
90
93 steeringSystem.tick(
94 (SteeringSystemTick_s)
95 {
96 .tick = sys_tick,
97 .secondaryConversion = (AnalogConversion_s)
98 {
99 .raw = 0,
100 .conversion = angle,
101 .status = AnalogSensorStatus_e::ANALOG_SENSOR_CLAMPED
102 }
103 }
104 );
105 ASSERT_TRUE(steeringSystem.getSteeringSystemData().angle == mockAngleFilters[0].filtered_result(angle));
106 ASSERT_TRUE(steeringSystem.getSteeringSystemData().status == SteeringSystemStatus_e::STEERING_SYSTEM_MARGINAL);
107}