#include <SimpleController.h>
Inheritance diagram for TorqueControllerSimple:
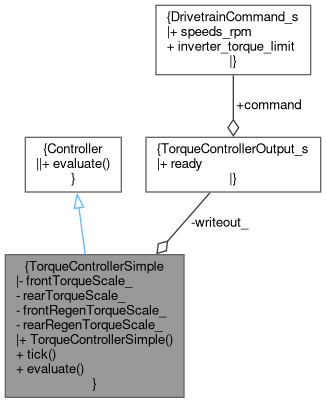
Collaboration diagram for TorqueControllerSimple:
Public Member Functions | |
| TorqueControllerSimple (float rearTorqueScale, float regenTorqueScale) | |
| simple TC with tunable F/R torque balance. Accel torque balance can be tuned independently of regen torque balance More... | |
| void | tick (const PedalsSystemData_s &pedalsData) |
| calculates torque output based off max torque and simple torque scaling metric defined in constructor and adjusts writeout_ accordingly More... | |
| TorqueControllerOutput_s | evaluate (const SharedCarState_s &state) override |
| virtual TorqueControllerOutput_s | evaluate (const SharedCarState_s &state)=0 |
| This mehod must be implemented by every controller in the Tc Muxer. This is called in the Muxer whenever the drivetrain command is obtained. TorqueControllerMux.cpp to see that in every tick of the system, the active controller must be ticked through this method. More... | |
Private Attributes | |
| TorqueControllerOutput_s | writeout_ |
| float | frontTorqueScale_ = 1.0 |
| float | rearTorqueScale_ = 1.0 |
| float | frontRegenTorqueScale_ = 1.0 |
| float | rearRegenTorqueScale_ = 1.0 |
Detailed Description
Definition at line 8 of file SimpleController.h.
Constructor & Destructor Documentation
◆ TorqueControllerSimple()
|
inline |
simple TC with tunable F/R torque balance. Accel torque balance can be tuned independently of regen torque balance
- Parameters
-
writeout the reference to the torque controller output being sent that contains the drivetrain command rearTorqueScale 0 to 2 scale on forward torque to rear wheels. 0 = FWD, 1 = Balanced, 2 = RWD regenTorqueScale same as rearTorqueScale but applies to regen torque split. 0 = All regen torque on the front, 1 = 50/50, 2 = all regen torque on the rear
Definition at line 22 of file SimpleController.h.
23 : frontTorqueScale_(2.0 - rearTorqueScale),
24 rearTorqueScale_(rearTorqueScale),
25 frontRegenTorqueScale_(2.0 - regenTorqueScale),
26 rearRegenTorqueScale_(regenTorqueScale)
27 {
30 }
float frontRegenTorqueScale_
Definition: SimpleController.h:14
TorqueControllerOutput_s writeout_
Definition: SimpleController.h:11
float rearRegenTorqueScale_
Definition: SimpleController.h:15
const DrivetrainCommand_s TC_COMMAND_NO_TORQUE
Definition: BaseController.h:9
Member Function Documentation
◆ evaluate()
|
overridevirtual |
- Note
- refer to parent class for function documentation
Implements Controller.
Definition at line 43 of file SimpleController.cpp.
44{
47}
void tick(const PedalsSystemData_s &pedalsData)
calculates torque output based off max torque and simple torque scaling metric defined in constructor...
Definition: SimpleController.cpp:3
◆ tick()
| void TorqueControllerSimple::tick | ( | const PedalsSystemData_s & | pedalsData | ) |
calculates torque output based off max torque and simple torque scaling metric defined in constructor and adjusts writeout_ accordingly
- Parameters
-
pedalsData controller calculates acceleration request from the pedals based off of this data
Definition at line 3 of file SimpleController.cpp.
4{
5
6 // Both pedals are not pressed and no implausibility has been detected
7 // accelRequest goes between 1.0 and -1.0
9 float torqueRequest;
10
11 if (accelRequest >= 0.0)
12 {
13 // Positive torque request
14 torqueRequest = accelRequest * PhysicalParameters::AMK_MAX_TORQUE;
15
20
25 }
26 else
27 {
28 // Negative torque request
29 torqueRequest = PhysicalParameters::MAX_REGEN_TORQUE * accelRequest * -1.0;
30
35
40 }
41}
float inverter_torque_limit[NUM_MOTORS]
Definition: SharedDataTypes.h:65
Member Data Documentation
◆ frontRegenTorqueScale_
|
private |
Definition at line 14 of file SimpleController.h.
◆ frontTorqueScale_
|
private |
Definition at line 12 of file SimpleController.h.
◆ rearRegenTorqueScale_
|
private |
Definition at line 15 of file SimpleController.h.
◆ rearTorqueScale_
|
private |
Definition at line 13 of file SimpleController.h.
◆ writeout_
|
private |
Definition at line 11 of file SimpleController.h.
The documentation for this class was generated from the following files:
- lib/systems/include/Controllers/SimpleController.h
- lib/systems/src/Controllers/SimpleController.cpp