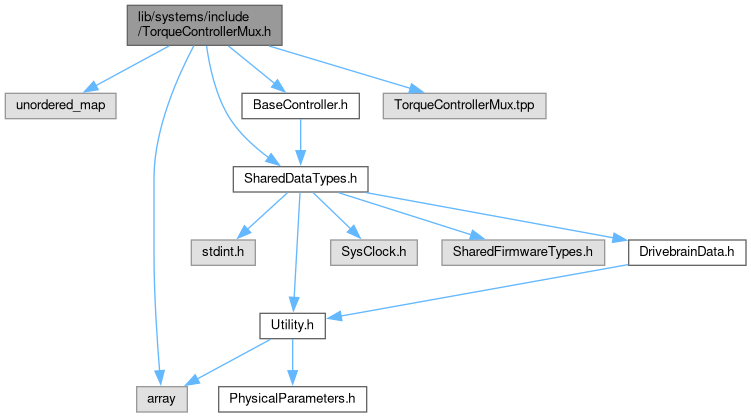
#include <unordered_map>#include <array>#include "SharedDataTypes.h"#include "BaseController.h"#include "TorqueControllerMux.tpp"
Include dependency graph for TorqueControllerMux.h:
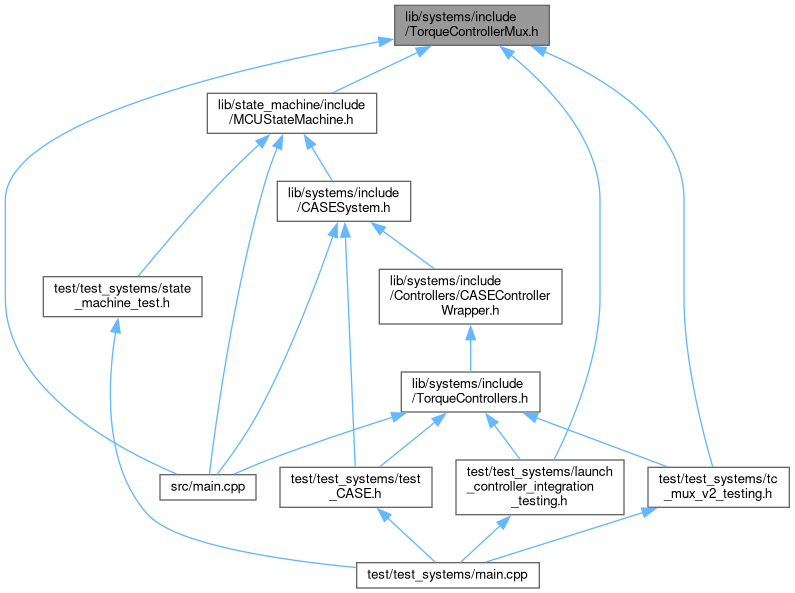
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | TorqueControllerMux< num_controllers > |
Namespaces | |
| namespace | TC_MUX_DEFAULT_PARAMS |
| Contains a max speed for mode changes(5 m/s), a max torque delta for mode change(.5 nm) and a max power limit(63000 W). These values are used in the event that no value is provided for them in the constructor. | |
Typedefs | |
| using | TCMuxType = TorqueControllerMux< number_of_controllers > |
Variables | |
| constexpr const float | TC_MUX_DEFAULT_PARAMS::MAX_SPEED_FOR_MODE_CHANGE = 5.0 |
| constexpr const float | TC_MUX_DEFAULT_PARAMS::MAX_TORQUE_DELTA_FOR_MODE_CHANGE = 0.5 |
| constexpr const float | TC_MUX_DEFAULT_PARAMS::MAX_POWER_LIMIT = 63000.0 |
| const int | number_of_controllers = 5 |
Typedef Documentation
◆ TCMuxType
Definition at line 146 of file TorqueControllerMux.h.
Variable Documentation
◆ number_of_controllers
| const int number_of_controllers = 5 |
Definition at line 145 of file TorqueControllerMux.h.