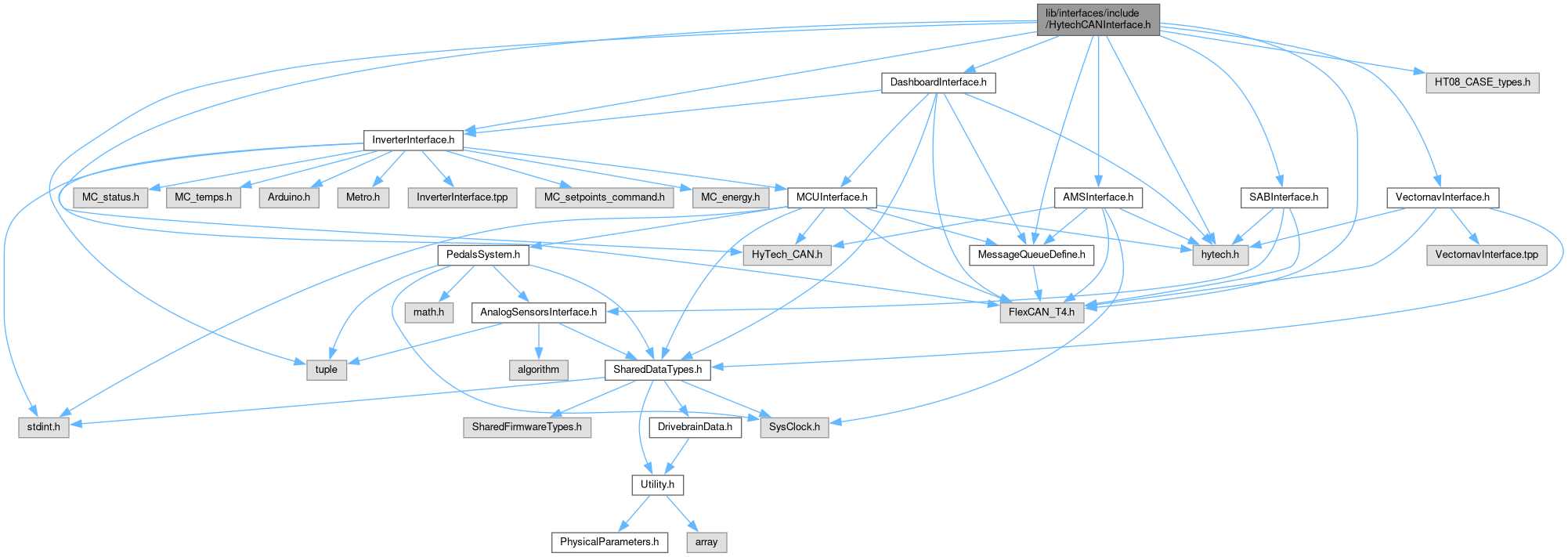
#include <tuple>#include "FlexCAN_T4.h"#include "hytech.h"#include "HyTech_CAN.h"#include "InverterInterface.h"#include "DashboardInterface.h"#include "AMSInterface.h"#include "SABInterface.h"#include "VectornavInterface.h"#include "HT08_CASE_types.h"#include "MessageQueueDefine.h"
Include dependency graph for HytechCANInterface.h:
Go to the source code of this file.
Classes | |
| struct | CANInterfaces< circular_buffer > |
Functions | |
| void | on_can1_receive (const CAN_message_t &msg) |
| void | on_can2_receive (const CAN_message_t &msg) |
| void | on_can3_receive (const CAN_message_t &msg) |
| template<typename BufferType , typename InterfaceType > | |
| void | process_ring_buffer (BufferType &rx_buffer, const InterfaceType &interfaces, unsigned long curr_millis) |
| template<typename bufferType > | |
| void | send_all_CAN_msgs (bufferType &buffer, FlexCAN_T4_Base *can_interface) |
| template<typename bufferType > | |
| void | enqueue_matlab_msg (bufferType *msg_queue, const CAN_MESSAGE_BUS &structure) |
| message enque function for matlab generated CAN_MESSAGE_BUS type More... | |
Variables | |
| Circular_Buffer< uint8_t,(uint32_t) 16, sizeof(CAN_message_t)> | CAN1_rxBuffer |
| Circular_Buffer< uint8_t,(uint32_t) 16, sizeof(CAN_message_t)> | CAN2_rxBuffer |
| Circular_Buffer< uint8_t,(uint32_t) 16, sizeof(CAN_message_t)> | CAN3_rxBuffer |
| CANBufferType | CAN1_txBuffer |
| CANBufferType | CAN2_txBuffer |
| CANBufferType | CAN3_txBuffer |
Function Documentation
◆ enqueue_matlab_msg()
template<typename bufferType >
| void enqueue_matlab_msg | ( | bufferType * | msg_queue, |
| const CAN_MESSAGE_BUS & | structure | ||
| ) |
message enque function for matlab generated CAN_MESSAGE_BUS type
- Template Parameters
-
bufferType the message buffer template type onto which you are enquing a msg
- Parameters
-
msg_queue the pointer to the msg queue that will contain the generic message structure the matlab generated CAN message type that will be sent
Definition at line 216 of file HytechCANInterface.h.
217{
218 CAN_message_t can_msg = {};
219 can_msg.id = structure.ID;
220 can_msg.len = structure.Length;
221 // TODO ensure memory safety of this, but this should be fine
222 memmove( can_msg.buf, structure.Data, structure.Length );
223 uint8_t buf[sizeof(CAN_message_t)] = {};
224 memmove(buf, &can_msg, sizeof(CAN_message_t));
225 msg_queue->push_back(buf, sizeof(CAN_message_t));
226}
◆ on_can1_receive()
| void on_can1_receive | ( | const CAN_message_t & | msg | ) |
Definition at line 12 of file HytechCANInterface.cpp.
13{
14 uint8_t buf[sizeof(CAN_message_t)];
17}
Circular_Buffer< uint8_t,(uint32_t) 16, sizeof(CAN_message_t)> CAN1_rxBuffer
Definition: HytechCANInterface.cpp:3
◆ on_can2_receive()
| void on_can2_receive | ( | const CAN_message_t & | msg | ) |
Definition at line 19 of file HytechCANInterface.cpp.
20{
21 uint8_t buf[sizeof(CAN_message_t)];
24}
Circular_Buffer< uint8_t,(uint32_t) 16, sizeof(CAN_message_t)> CAN2_rxBuffer
Definition: HytechCANInterface.cpp:4
◆ on_can3_receive()
| void on_can3_receive | ( | const CAN_message_t & | msg | ) |
Definition at line 26 of file HytechCANInterface.cpp.
27{
28 uint8_t buf[sizeof(CAN_message_t)];
31}
Circular_Buffer< uint8_t,(uint32_t) 16, sizeof(CAN_message_t)> CAN3_rxBuffer
Definition: HytechCANInterface.cpp:5
◆ process_ring_buffer()
template<typename BufferType , typename InterfaceType >
| void process_ring_buffer | ( | BufferType & | rx_buffer, |
| const InterfaceType & | interfaces, | ||
| unsigned long | curr_millis | ||
| ) |
Definition at line 72 of file HytechCANInterface.h.
73{
74 // TODO switch to using the global CAN receive function from the generated CAN library
75 // if(rx_buffer.size() > 0){
76
77 // Serial.println(rx_buffer.size());
78 // }
79 while (rx_buffer.available())
80 {
81 CAN_message_t recvd_msg;
82 uint8_t buf[sizeof(CAN_message_t)];
83 rx_buffer.pop_front(buf, sizeof(CAN_message_t));
84 memmove(&recvd_msg, buf, sizeof(recvd_msg));
85 switch (recvd_msg.id)
86 {
87
88 case DASHBOARD_STATE_CANID:
89 interfaces.dash_interface->read(recvd_msg);
90 break;
91
92 // AMS msg receives
93 case ID_BMS_STATUS:
94 interfaces.ams_interface->retrieve_status_CAN(curr_millis, recvd_msg);
95 break;
96 case ID_BMS_TEMPERATURES:
97 interfaces.ams_interface->retrieve_temp_CAN(recvd_msg);
98 break;
99 case ID_BMS_VOLTAGES:
100 interfaces.ams_interface->retrieve_voltage_CAN(recvd_msg);
101 break;
102 case ID_EM_MEASUREMENT:
103 interfaces.ams_interface->retrieve_em_measurement_CAN(recvd_msg);
104 break;
105 case ACU_SHUNT_MEASUREMENTS_CANID:
106 interfaces.ams_interface->retrieve_current_shunt_CAN(recvd_msg);
107 break;
108
109 // MC status msgs
110 case ID_MC1_STATUS:
111 interfaces.front_left_inv->receive_status_msg(recvd_msg);
112 break;
113 case ID_MC2_STATUS:
114 interfaces.front_right_inv->receive_status_msg(recvd_msg);
115 break;
116 case ID_MC3_STATUS:
117 interfaces.rear_left_inv->receive_status_msg(recvd_msg);
118 break;
119 case ID_MC4_STATUS:
120 interfaces.rear_right_inv->receive_status_msg(recvd_msg);
121 break;
122
123 // MC temp msgs
124 case ID_MC1_TEMPS:
125 interfaces.front_left_inv->receive_temp_msg(recvd_msg);
126 break;
127 case ID_MC2_TEMPS:
128 interfaces.front_right_inv->receive_temp_msg(recvd_msg);
129 break;
130 case ID_MC3_TEMPS:
131 interfaces.rear_left_inv->receive_temp_msg(recvd_msg);
132 break;
133 case ID_MC4_TEMPS:
134 interfaces.rear_right_inv->receive_temp_msg(recvd_msg);
135 break;
136
137 // MC energy msgs
138 case ID_MC1_ENERGY:
139 interfaces.front_left_inv->receive_energy_msg(recvd_msg);
140 break;
141 case ID_MC2_ENERGY:
142 interfaces.front_right_inv->receive_energy_msg(recvd_msg);
143 break;
144 case ID_MC3_ENERGY:
145 interfaces.rear_left_inv->receive_energy_msg(recvd_msg);
146 break;
147 case ID_MC4_ENERGY:
148 interfaces.rear_right_inv->receive_energy_msg(recvd_msg);
149 break;
150
151 // SAB msgs
152 case SAB_SUSPENSION_CANID:
153 interfaces.sab_interface->retrieve_pots_and_load_cells_CAN(recvd_msg);
154 break;
155
156 // vector nav msgs
157 case VN_VEL_CANID:
158 interfaces.vn_interface->retrieve_velocity_CAN(recvd_msg);
159 break;
160 case VN_LINEAR_ACCEL_CANID:
161 interfaces.vn_interface->retrieve_linear_accel_CAN(recvd_msg);
162 break;
163 case VN_LINEAR_ACCEL_UNCOMP_CANID:
164 interfaces.vn_interface->retrieve_uncompLinear_accel_CAN(recvd_msg);
165 break;
166 case VN_YPR_CANID:
167 interfaces.vn_interface->retrieve_ypr_CAN(recvd_msg);
168 break;
169 case VN_LAT_LON_CANID:
170 interfaces.vn_interface->retrieve_lat_lon_CAN(recvd_msg);
171 break;
172 case VN_GPS_TIME_MSG_CANID:
173 interfaces.vn_interface->retrieve_gps_time_CAN(recvd_msg);
174 break;
175 case VN_STATUS_CANID:
176 interfaces.vn_interface->retrieve_vn_status_CAN(recvd_msg); // double check this
177 break;
178 case VN_ANGULAR_RATE_CANID:
179 interfaces.vn_interface->receive_ang_rates_CAN(recvd_msg);
180 break;
181 default:
182 break;
183 }
184 }
185}
◆ send_all_CAN_msgs()
template<typename bufferType >
| void send_all_CAN_msgs | ( | bufferType & | buffer, |
| FlexCAN_T4_Base * | can_interface | ||
| ) |
Definition at line 191 of file HytechCANInterface.h.
Variable Documentation
◆ CAN1_rxBuffer
|
extern |
Definition at line 3 of file HytechCANInterface.cpp.
◆ CAN1_txBuffer
|
extern |
Definition at line 7 of file HytechCANInterface.cpp.
◆ CAN2_rxBuffer
|
extern |
Definition at line 4 of file HytechCANInterface.cpp.
◆ CAN2_txBuffer
|
extern |
Definition at line 8 of file HytechCANInterface.cpp.
◆ CAN3_rxBuffer
|
extern |
Definition at line 5 of file HytechCANInterface.cpp.
◆ CAN3_txBuffer
|
extern |